
Regelung der Zuverlässigkeit mechatronischer Systeme

Zuverlässigkeitsadaptive Systeme ermöglichen eine Anpassung des Systemverhaltens basierend auf der aktuellen Systemzuverlässigkeit. Sie können damit ihre Lebensdauer und die Leistungsfähigkeit situationsbezogen gegeneinander abwägen. Dies kann genutzt werden, um das Ausfallverhalten an einen Wartungsplan anzupassen, wodurch die Verfügbarkeit erhöht und das Potenzial des Systems voll ausgeschöpft wird. Um die Implementierung einer solchen Anpassung zu ermöglichen, ist ein von einem Verschleißmodell unabhängiger Regelalgorithmus gewünscht.
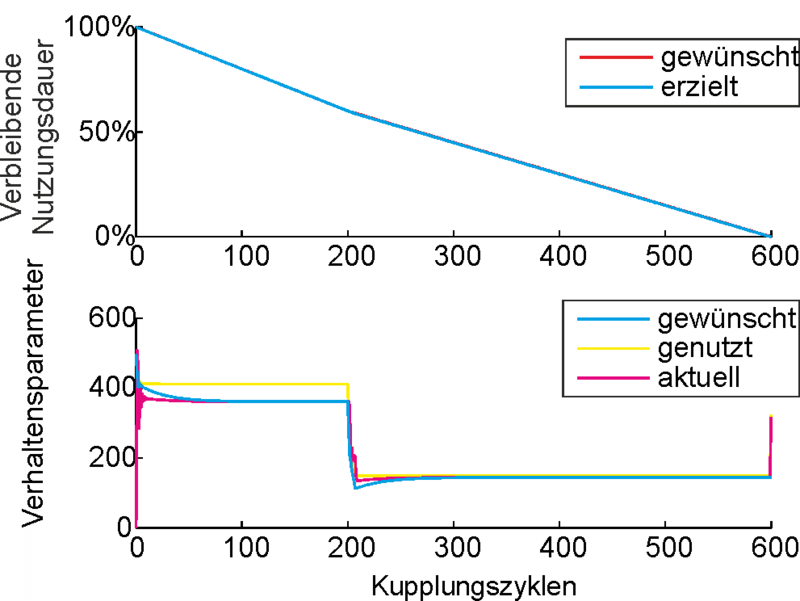
Ein Zuverlässigkeitsregler auf Basis des health index, eines Maßes für Systemverschleiß, wurde von Herrn Dr.-Ing. Tobias Meyer im Rahmen seiner Promotion entwickelt. Die Regelung nutzt dazu Selbstoptimierung als eine mögliche Umsetzung der Verhaltensanpassung. Diese basiert auf der Auswahl von Zielen, die das System verfolgt. Mögliche Arbeitspunkte werden vorab mit Mehrzieloptimierungstechniken berechnet. Der Regler stellt die Priorität von Zielen ein und wägt damit zwischen Zuverlässigkeit und Leistungsfähigkeit ab.
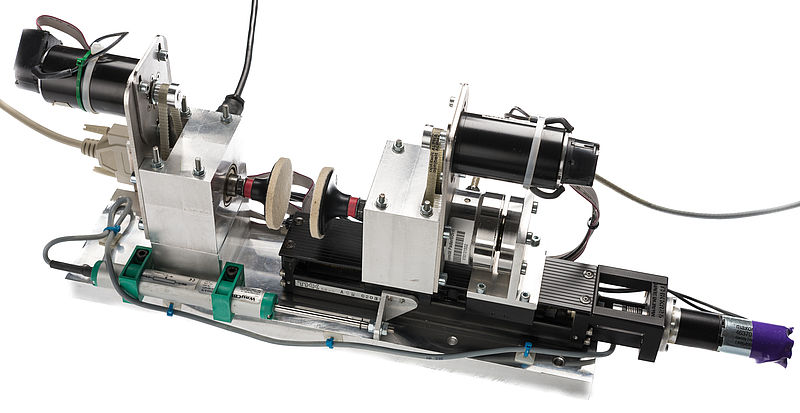
Als Beispielanwendung wird eine automatische Einscheiben-Trockenkupplung eingeführt. Der Zuverlässigkeitsregler wird vollständig aufgebaut und Lebensdauerexperimente werden durchgeführt. Ergebnisse zeigen, dass die Streuung der Ausfallzeit stark reduziert werden kann, wodurch das Ausfallverhalten besser vorhersehbar wird. Zugleich kann die gewünschte Lebensdauer auf Kosten der Leistungsfähigkeit erhöht werden, um verlängerte Wartungsintervalle zu realisieren. Damit ermöglicht das zuverlässigkeitsadaptive System eine bessere Ausnutzung der Systemleistungsfähigkeit und eine bessere Planung der Wartung. Eine detaillierte Beschreibung ist hier zu finden.
Die Dissertationsschrift von Dr. Meyer können Sie hier erwerben.
Seine Veröffentlichungen sind hier gelistet.
