Piezoelektrische Motoren
Piezoelektrische Elemente bieten recht hohe Kräfte, aber ihr Hub ist stark begrenzt. Durch die Addition von Einzelschritten können auch kontinuierliche rotatorische und größere translatorische Bewegungen erzielt werden. Im Folgenden werden verschiedene Mechanismen dazu vorgestellt.
Piezoelektrische Trägheitsmotoren
In piezoelektrischen Trägheitsmotoren wird die Problematik des geringen Hubs piezoelektrischer Festkörperaktoren durch die Akkumulation einer Vielzahl kleiner Schritte gelöst, so dass ein prinzipiell unbegrenzter Hub erreicht wird. Das Bild zeigt ein recht einfaches Funktionsprinzip: bei langsamer Bewegung haftet die zu bewegende Masse an einem Stab, der durch einen Piezoaktor verschoben wird, während sie beim schnellen Rückhub durchrutscht und so pro Zyklus einen um kleinen Weg verschoben bleibt.
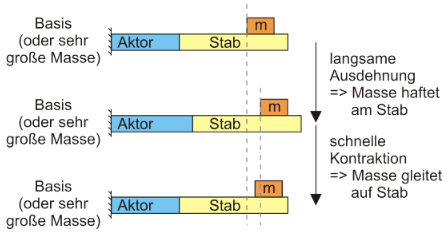

Trägheitsmotoren existieren sowohl als Translations- als auch als Rotationsantriebe in einer Vielzahl verschiedener Bauformen. In der Fachliteratur werden diese auch als „stick-slip drive“ bzw. „impact drive“ bezeichnet.
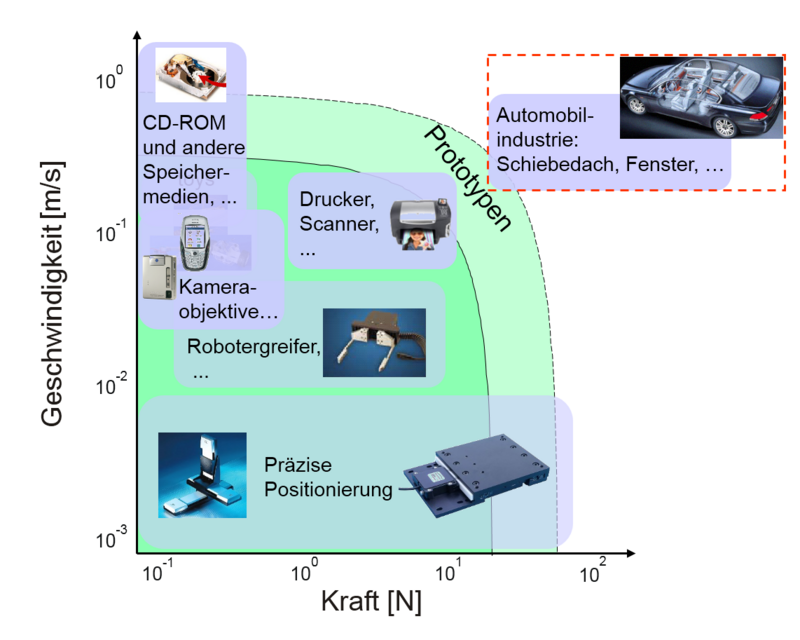
Die ersten Trägheitsmotoren wurden als Hochpräzisions-Positioniereinrichtungen für den Einsatz in der Mikroskopie, z. B. in Rastertunnelmikroskopen, entwickelt. Trägheitsmotoren für diese Anwendungen sind meist Einzelstücke und bedingt durch den Einsatzzweck weder besonders klein noch optimiert in Hinsicht auf Tragfähigkeit oder Geschwindigkeit. Erst in den letzten Jahren wurden auch Trägheitsmotoren für andere Anwendungen vorgestellt. Der Schwerpunkt liegt dabei auf Geschwindigkeit, Wirtschaftlichkeit, Zuverlässigkeit, Einfachheit und guter Miniaturisierbarkeit. Zum Einsatz kommen solche Motoren beispielsweise in Zoomlinsen von Mobiltelefon- und PDA-Kameras oder beim Verwackelungsschutz in Digitalkameras.
Bei der Entwicklung eines piezoelektrischen Trägheitsmotors sind verschiedene Fragen zu beantworten: Wie groß sollen die bewegten Massen sein? Welche Anpresskraft ist sinnvoll? Wie werden die Reibflächen gestaltet? Mit welchem elektrischen Signal wird der Motor bei welcher Frequenz angesteuert? Diese Fragen werden derzeit weitgehend durch den Bau und Test von Prototypen beantwortet. Dieser Prozess ist zeit- und kostenaufwändig und eine effektive anwendungsbezogene Auslegung der Motoren ist so nicht möglich. Modellierungsansätze wie sie z. B. in der Dissertation von Dr. Matthias Hunstig beschrieben werden bieten hier wesentliche Vorteile.
Piezoelektrische Schwingungsantriebe
Beim Rotations-Wanderwellenmotor wird der kreisringförmige Stator über piezoelektrische Aktoren zu Biegeschwingungen in Form von umlaufenden Wellen angeregt. Die materiellen Oberflächenpunkte des Stators bewegen sich dabei auf elliptischen Bahnen. Bei maximaler Auslenkung haben sie eine Geschwindigkeitskomponente in Umfangsrichtung, die den aufgepressten Rotor in Drehung versetzt. Die Schwingungsanregung erfolgt bei einer Resonanzfrequenz des Stators im Ultraschallbereich. Dabei werden Schwingungsamplituden bis zu einigen Mikrometern erreicht, die reibkraftschlüssig in eine kontinuierliche Drehbewegung umgesetzt werden. Typische Leistungsdaten heutiger Wanderwellenmotoren sind ein Drehmoment bis zu 2 Nm und Drehzahlen um 100 U/min.
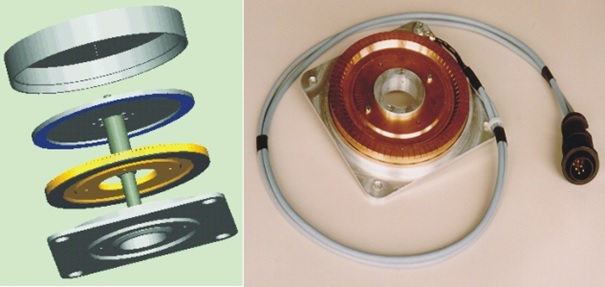
Das Funktionsprinzip verleiht den Antrieben eine Reihe günstiger Eigenschaften, die sie bei zahlreichen Anwendungen zu vorteilhaften Alternativen gegenüber klassischen Elektroantrieben machen. Interessant ist vor allem der einfache mechanische Aufbau und die Erzeugung hoher Drehmomente und Wirkleistungen bereits bei niedrigen Drehzahlen, wodurch oft auf ein zusätzliches Getriebe verzichtet werden kann. Weitere Vorteile sind das hohe Haltemoment bei abgeschalteter Spannungsversorgung, die hohe Dynamik und die hohe Präzision bei der Feinpositionierung.
Die präzise Erzeugung translatorischer und linearer Bewegungen ist eine wichtige Aufgabe der modernen Technik. Klassische Anwendungsbeispiele sind die Positionierachsen von Fertigungsmaschinen. Auch in Geräten der Konsumgüterindustrie wie dem CD-Player gilt es, Schubladen linear zu bewegen oder Schreib- und Leseköpfe von Speichermedien zu positionieren.
Schwingungsantriebe können direkt ohne Getriebe eine translatorische Bewegung erzeugen. Dadurch ergeben sich gegenüber der konventionellen Rotationsmotor-Getriebe-Lösung folgende Vorteile:
- keine Getriebeverluste, dadurch hoher Gesamtwirkungsgrad,
- geringe Anzahl von Bauteilen,
- geringer Bauraum,
- kein Umkehrspiel oder Lose,
- gute Dynamik,
- Wegauflösung im Bereich weniger Nanometer.
Seit etwa Mitte der 1990er Jahre sind translatorische piezoelektrische Schwingungsantriebe auch kommerziell verfügbar. Bisher können Kräfte bis zu 40 N und Vortriebsgeschwindigkeiten bis zu 300 mm/s erzielt werden. Damit ergibt sich zwar ein weites Feld möglicher Applikationen, das bislang jedoch nicht voll ausgeschöpft wird. Zudem reichen die Leistungsdaten für viele weitere Aufgabenstellungen nicht aus.
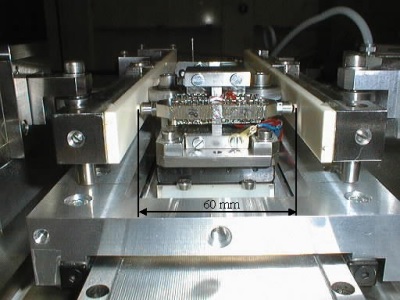
Im Rahmen der bei uns durchgeführten Arbeiten wurden zuerst die prinzipiell denkbaren und praktisch nutzbaren Funktionsarten und Bauformen von linearen Schwingungsantrieben erforscht. Dabei wurde das "Ruderer"-Prinzip, bei dem Kräfte an zwei entgegen gesetzten Punkten eines Aktors abgegriffen werden, als erfolgversprechend erkannt. Anhand mehrerer Protoypen wurden verschiedene Bauformen bezüglich ihrer Leistungen charakterisiert. Es werden optimierte Antriebe entworfen, aufgebaut und in diversen Anwendungen appliziert.
Veröffentlichungen zu diesem Forschungsbereich finden Sie hier.
